ロボット‐アーム【robot arm】
ロボットアーム
出典: フリー百科事典『ウィキペディア(Wikipedia)』 (2025/06/02 03:48 UTC 版)


ロボットアームは人間の腕に似た働きをするメカニカルアームの一種であり、通常はプログラミング可能である。ロボットアームが機械装置全体ということもあればもっと複雑なロボットの一部ということもある。(多関節ロボットのような)回転動作や橋渡しのための(直線的な)動作をするようにそういったマニピュレーターの接続部はジョイントでつながれている[1][2]。連鎖機構を形作っているとマニピュレーターの接続部は見なせる。マニピュレーターの連鎖機構の終端部は効果器といわれ、人の手に似ている。
ロボットハンド


効果器、つまりロボットハンド(英: Robot end effector)は応用次第で溶接、保持、回転動作など要求されたタスクを行えるよう設計ができる。たとえば自動車産業の組み立てラインのロボットアームは溶接や組み立て中の部品の回転や設置などのいろいろなタスクを行う。爆発物の解除や処理を行うために設計されたロボットなど、一部では人の手の精密な再現が求められることがある[5]。
種類


- 直交ロボット/ガントリーロボット
- 選んで配置する作業やシーラント充填、組み立て操作、また工具を扱ったりアーク溶接をするのに使われる。3つの直進ジョイントがあり直交座標系によって同一の軸が動くロボットである。
- シリンダーロボット
- 組み立て操作や工具の取り扱い、スポット溶接、ダイカスト機械の取り扱いに使われる。円柱座標系で軸が動くロボットである。
- 球体ロボット/極座標ロボット
- 工具の取り扱い、スポット溶接、ダイカスト、バリ取り機、ガス溶接やアーク溶接に使われる。極座標系で軸が動くロボットである。
- SCARA型ロボット
- 選んで配置する作業、シーラント充填、組み立て操作や工具の取り扱いに使われる。このロボットは水平面での自由な動作をするための2つの平行なジョイントが特徴である。
- 垂直多関節ロボット
- 組み立て操作やダイカスト、バリ取り機、ガス溶接、アーク溶接、スプレー塗装に使われる。アームに少なくても3つの回転ジョイントがあるロボットである。
- 並列リンクマニピュレータ
- コックピットのフライトシミュレーターを行うモバイルプラットフォームとして使われたりする。アームに連動する直進ジョイントや回転ジョイントがあるロボットである。
- 人型ロボット
- 独立した指を持つなど、人の手を真似た形になっている。
特筆すべきロボットアーム

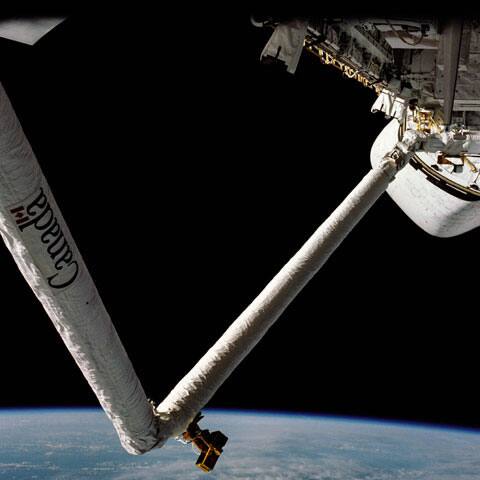
CanadarmやSRMSとしても知られるスペースシャトル・リモート・マニピュレータ・システムとその後継であるカナダアーム2が複数の自由度を持つロボットアームの宇宙での例である。カメラやセンサー付きの特別に取り付けられたブームを使用したスペースシャトルの検査、また人工衛星の配備やスペースシャトルの格納庫からの回復処理などのいろいろなタスクを行うためにこれらのロボットアームは使われてきた[6]。
火星上のキュリオシティ探査車でもロボットアームが使われる[7][8][9][10]。
チェスや将棋などの駒をロボットアームで移動させることで、盤と駒を使った対局が可能なシステムも開発されている[11][12]。
低コストのロボットアーム
2010年代には低コストのロボットアームの入手がとてもしやすくなった。そういったロボットアームはほとんどはホビーや教育用のデバイスとして売られているが、オートサンプラーとして使うなどラボラトリーオートメーションに使うことが提案されている[13][14]。
出典
- ^ “OSHA Technical Manual”. 2007年9月23日閲覧。
- ^ “Paper on Space Robotics”. p. 9. 2017年11月16日時点のオリジナルよりアーカイブ。2007年4月9日閲覧。
- ^ “Robot Arm and Computer Vision”. 2016年7月29日閲覧。
- ^ “MeArm Open Source Robot Arm (source files)”. 2016年6月21日閲覧。
- ^ Staff (Sandia National Labs) (2012-08-16), “Life-like, cost-effective robotic hand can disable IEDs”, R&D Magazine 2012年9月13日閲覧。
- ^ R. Gillett; A. Kerr; C. Sallaberger; D. Maharaj; E. Martin; R. Richards; A. Ulitsky (2004-05). A hybrid range imaging system solution for in-flight space shuttle inspection. IEEE. ISBN 0-7803-8253-6. ISSN 0840-7789.
- ^ “Curiosity Rover - Arm and Hand”. JPL. NASA. 2012年8月21日閲覧。
- ^ Jandura, Louise. “Mars Science Laboratory Sample Acquisition, Sample Processing and Handling: Subsystem Design and Test Challenges” (PDF). JPL. NASA. 2012年8月21日閲覧。
- ^ “Curiosity Stretches its Arm”. JPL (NASA). (2012年8月21日) 2012年8月21日閲覧。
- ^ “Mars Science Laboratory Robotic Arm” (PDF). 15th European Space Mechanisms and Tribology Symposium 2011 (2011年). 2012年8月21日閲覧。
- ^ “将棋代指しロボット「電王手くん」がダブルアームに最終進化! 名前の由来はあの伝説の棋士?”. ITmedia PC USER. 2024年6月2日閲覧。
- ^ Inc, Aetas. “[TGS2022]将棋・囲碁ソフトの老舗,シルバースタージャパンブースに設置されていた“将棋ロボット”をチェック。その性能や如何に”. 4Gamer.net. 2024年6月2日閲覧。
- ^ Carvalho, Matheus C.; Eyre, Bradley D. (2013-12-01). “A low cost, easy to build, portable, and universal autosampler for liquids”. Methods in Oceanography 8: 23–32. doi:10.1016/j.mio.2014.06.001.
- ^ McMorran, Darren; Chung, Dwayne Chung Kim; Li, Jonathan; Muradoglu, Murat; Liew, Oi Wah; Ng, Tuck Wah (2016-02-16). “Adapting a Low-Cost Selective Compliant Articulated Robotic Arm for Spillage Avoidance” (英語). Journal of Laboratory Automation: 2211068216630742. doi:10.1177/2211068216630742. ISSN 2211-0682. PMID 26882923.
関連項目
- 3Dプリンター
- 垂直多関節ロボット
- オフラインティーチング
- ロボットシミュレーター
- 欧州ロボットアーム
- キュリオシティ (探査車)
- オープンソースロボット
- 義肢
- ロボットスイート
- 動作範囲
- グラップルトラック
外部リンク

ロボットアーム (JEM-RMS)
出典: フリー百科事典『ウィキペディア(Wikipedia)』 (2022/04/27 04:28 UTC 版)
「きぼう」の記事における「ロボットアーム (JEM-RMS)」の解説
きぼうロボットアーム (JEM-Remote Manipulator System:JEM-RMS)は、実験や船体の保全作業支援に使用するロボットアームである。全長10mの親アームと、親アームの先端に取り付けて使用する2.2mの子アームの2つと船内のロボットアーム操作卓(RMSラック)からなる。アームはそれぞれ6つの関節を持ち、人間の腕と同じような動作が可能である。 親アームは船内実験室のエアロックの左上にあるロボットアーム取付け台に設置されており、親アームブーム(船内実験室側から順に1から3まである)、関節、把持手であるエンドエフェクター(End Effector)、テレビカメラ・雲台・照明(視覚装置)で構成され、親アームブーム2(肘部)と3(手首部)にテレビカメラ・雲台・照明(各々肘部視覚装置、手首部視覚装置)があり、カメラ超しに映像を見ながら船外実験装置の交換作業を中心に使われる。子アームは、子アームエレクトロニクス、子アームブーム、関節、把持手であるエンドエフェクター(ツールと呼称)、テレビカメラで構成されている。親アームのエンドエフェクターで子アームを把持した上で、船外実験プラットフォームにある軌道上交換ユニット(ORU)の交換など、精度の高い作業で使われるため、アーム先端が対象物に合わせて自動でアームの姿勢制御を行うコンプライアンス機能が搭載されている。子アームを使わない時は、船外実験プラットフォーム上面の手前右に設けられている「子アーム保管装置(Small fine arm Stowage Equipment:SSE)」に収められており、親アームも使わない時は、親アームブーム1を垂直に立てた上で親アームブーム2を斜め下に折り曲げた山折りの状態の保存姿勢で待機している。親アームは、電力・通信インターフェース付グラプルフィクスチャー(Power and Data Grapple Fixture:PDGF)と、軌道上取り外し可能型グラプルフィクスチャー(Flight Releasable Grapple Fixture:FRGF)の両方に対応している。 子アームはHTV初号機の与圧部に搭載して打ち上げられ、きぼう内で組み立てられた後、きぼうのエアロックを使って船外実験プラットフォームへ搬出され、子アーム保管装置に収納された。子アームが扱えるものは、きぼう標準のツールフィクスチャーが取り付けられているものに限られ、ツールフィクスチャーには把持及びトルク供給機能があるI型と、把持及び電力供給、信号授受機能があるII型の2種類ある。 JEM-RMSは地上からも遠隔操作で動かすことができる。2012年のHTV3号機からこの地上からの遠隔操作を本格使用する予定であり、そのための試験が2011年12月6日に行われた。以後、ロボットアームの操作は主に地上からの遠隔で行われており、その分宇宙飛行士の活動時間を他の作業に割り当てることができるようになっている。 なお、きぼうロボットアームの開発にあたって、1997年8月に打ち上げられたスペースシャトルのSTS-85で行われたマニピュレーター飛行実証試験(Manipulator Flight Demonstration:MFD)のロボットアームや、1997年に打ち上げられたきく7号に搭載されたロボットアームで培われた技術と運用経験が設計に生かされており、日本で3番目となる宇宙用遠隔操作型ロボットアームシステムであり、かつ日本初の実用宇宙ロボットである。 主要諸元 親アーム型式 - 親子式6自由度アーム 自由度 - 6 長さ - 10m 質量 - 780kg 取扱量 - 最大7,000kg 位置決め精度 - 並進±50mm、回転±1度 先端速度 - 60mm/s(対象物:600kg以下)、30mm/s(対象物:3,000kg以下)、20mm/s(対象物:7,000kg以下) 最大先端力 - 30N以上 寿命 - 10年以上 子アーム型式 - 親子式6自由度アーム 自由度 - 6 長さ - 2.2m 質量 - 190kg 取扱量 - 最大300kg 位置決め精度 - 並進±10mm、回転±1度 先端速度 - 50mm/s(対象物:80kg以下)、25mm/s(対象物:300kg以下) 最大先端力 - 30N以上 寿命 - 10年以上
※この「ロボットアーム (JEM-RMS)」の解説は、「きぼう」の解説の一部です。
「ロボットアーム (JEM-RMS)」を含む「きぼう」の記事については、「きぼう」の概要を参照ください。
「ロボットアーム」の例文・使い方・用例・文例
- 映画では,宇宙遊泳のシーンや,宇宙飛行士がISSを組み立てるためにロボットアームを使うところが見られる。
- 3月14日,土井さんはロボットアームを使ってエンデバーの貨物室からモジュールを取り出し,ISSに設置した。
- 土井さんは,ISSのカメラから送信される映像を見ながら,2つのコントローラーを使って,エンデバーのデッキからロボットアームを操作した。
- 5月13日,スペースシャトル「アトランティス号」に搭乗している米国航空宇宙局(NASA)の宇宙飛行士がシャトルのロボットアームで望遠鏡をつかむことに成功した。
- 山崎さんはISSへの補給品の運搬やISSのロボットアームの操作を担当した。
- 4月7日の夜,彼女は同僚と協力してロボットアームを操作した。
- 日本人宇宙飛行士でロボットアーム操作のスペシャリストである若田光(こう)一(いち)さん(46)は山崎さんの功績を称え,「満点をあげたい。彼女を同僚に持って誇りに思う。」と話した。
- 彼はロボットアームの操作の上手さを賞賛されている。
- 試料の採取場所が決まると,OSIRIS-RExはロボットアームを伸ばし,地表の物質を50グラム以上カプセルに採取する。
- 15日間の宇宙での任務中,彼女は国際宇宙ステーションへの補給品の運搬やステーションのロボットアームの操作を担当した。
- このカプセルがISSに接近したとき,ISSに搭乗している宇宙飛行士たちはロボットアームを使ってドラゴンをつかみ,ドッキングのためにそれを引き寄せた。
- 1月と4月に米国の無人補給船がISSに到着したとき,彼はロボットアームを使ってそれらをうまくISSとドッキングさせた。
- 8月24日,油井さんはロボットアームを使い,8月19日に日本の種(たね)子(が)島(しま)宇宙センターから打ち上げられた無人補給機「こうのとり」5号機をキャッチした。
- ロボット‐アームのページへのリンク


