ステッピング‐モーター【stepping motor】
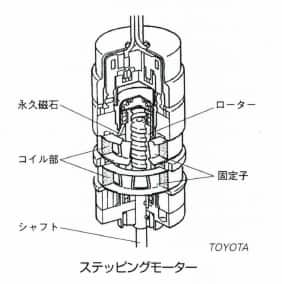
ステッピングモーター
ステッピングモーターとは、一定の間隔で瞬間的に電流量を変動せるパルス状の入力電流によって駆動するモーターのことである。
ステッピングモーターは、パルス電流が入力されるごとに、一定の角度ずつモーターが回転するよう制御されている。この時の回転角はステップ角と呼ばれる。ステップ角を小さくすることで、モーターの位置を決める精度を向上することができる。
ステッピングモーターの基本構造は、回転軸に取り付けられた磁石(ローター)と、その外側に固定された電磁石(ステーター)とで構成される。ステーターに巻きつけられたコイルにパルス電流を流すと、磁力が発生し、ローターが引きつけられることで回転する。
ステッピングモーターは、他のモーターに比べて構造が簡単で長寿命である。また、システムコストが安く、フィードバック制御が不要であり、デジタル制御回路に向いている。一方で、高速回転が困難で、消費電力が比較的大きい。
ステッピングモーター
パルス入力信号に応じてステップ状に変位するモーターで、NCサーボの要素部品。10W以下の、精度や脱調による誤差の集積に影響されないシステムに使用する。ステップモーター、DCバルスモーター、あるいはステップモーターとも呼ぶ。可変ショックアブソーバーの制御や電子制御スロットルなど、採用例が増えている。
ステッピングモーター
出典: フリー百科事典『ウィキペディア(Wikipedia)』 (2025/05/08 08:58 UTC 版)
|
|
この記事には参考文献や外部リンクの一覧が含まれていますが、脚注による参照が不十分であるため、情報源が依然不明確です。
|



ステッピングモーター(Stepper motor)は、ドライバを介して直流のパルス電圧を印加して駆動する電動機である。したがってパルスモーター(Pulse motor)ともいわれる。簡単な回路構成で、正確な位置決め制御を実現できるので、装置の位置決めを行う場合などによく使われる。
特徴
- 運動量が駆動パルスの数に比例する。
- デジタル制御回路との相性が良い。
- フィードバック回路の必要性がない(開ループ制御)。
- エネルギー効率が低い。
- 負荷が大きすぎたり、パルス周波数が高すぎると同期外れで誤動作につながる。この状態を「脱調」と呼び、加減速シーケンスを用いると改善することがある。
回転子の種類
Permanent Magnet Type (PM型:永久磁石形)
Variable Reluctance Type (VR型:歯車状鉄心形)
- 回転子として、歯車状の鉄心を使用する。ステップ角度を小さくできるが、トルクがやや低い。
Hybrid Type (HB型:複合形)
- PM型とVR型の特徴を併せ持った構造である。PM型の場合は円周方向に着磁するが、HB型では軸方向に着磁した磁石を使用し、磁極側を二枚の歯車状鉄心で挟み込む。この時、N極側とS極側の歯の凸凹が逆になるようにする。
固定子の巻線構成
ステッピングモーターは、固定子に複数の巻線を用意しておき、電流を流す巻線を切り替えることによって動作させる。巻線構成としては二相(二組の巻線)のものが一般的であるが、三相、五相といったものもある。
ステッピングモーターの動作原理
PM型の簡略化したモデルを例にとって、動作原理を説明する。
- 巻き線Aに電流を流すと、固定子と回転子のN・Sが引き合った状態になる。
- 巻き線Bにも電流を流すと、両方の固定子が磁化して回転子を引きつけるので、力が釣り合うように45°回転する。
- 巻き線Aの電流を切ると、さらに45°回転する。
- 巻き線Aに先程と逆方向の電流を流すと、さらに45°回転する。
- 巻き線Bの電流を切ると、さらに45°回転する。
- 巻き線Bに先程と逆方向の電流を流すと、さらに45°回転する。
- 巻き線Aの電流を切ると、さらに45°回転する。
- 巻き線Aに最初と同じ方向の電流を流すと、さらに45°回転する。
以上のように、ステップ1から8を繰り返すことによって、一定の方向に回転する。
| ステップ | 端子1 巻き線A |
端子2 巻き線A |
端子1 巻き線B |
端子2 巻き線B |
画像 |
|---|---|---|---|---|---|
| ステップ1 | +Vcc | -Vcc |  |
||
| ステップ2 | +Vcc | -Vcc | +Vcc | -Vcc |  |
| ステップ3 | +Vcc | -Vcc |  |
||
| ステップ4 | -Vcc | +Vcc | +Vcc | -Vcc |  |
| ステップ5 | -Vcc | +Vcc |  |
||
| ステップ6 | -Vcc | +Vcc | -Vcc | +Vcc |  |
| ステップ7 | -Vcc | +Vcc |  |
||
| ステップ8 | +Vcc | -Vcc | -Vcc | +Vcc |  |
励磁モード

ステッピングモーターは、巻き線への電流の与え方を変えることにより、特性を変えることができる。二相型の電動機について以下に述べる。
- 一相励磁
- 常に巻き線一相のみに電流を流す。位置決め精度は良いが、減衰運動が残りやすい。
- 二相励磁
- 二相に電流を流す。一相励磁の約2倍の出力トルクが得られる。
- 一-二相励磁
- 一相と二相を交互に切り替えて電流を流す。一相励磁・二相励磁の場合のステップ角度の半分にすることができるので、滑らかな回転を得られる。前のセクションの説明図では、一-二相励磁を使っている。
- マイクロステップ駆動(バーニア駆動)
- 巻き線への電流を単純なON/OFFではなく、二つの巻き線の電流比率を細かく変えていくことで、より細かいステップ角度を得る手法。
運動形態
一般的な回転形の電動機の他に、直進形の電動機(リニアステッピング)も存在する。
用途例
- 一般家庭用途
- 航空機用途
- 自動車用途
- デジタルカメラ
- 写真レンズの移動に主にステッピングモーターが使用されている。ただし、携帯電話内蔵カメラのような小型のカメラモジュールではサイズの関係からリニアモーターが採用されていることも多い。
関連項目
外部リンク
- Stepper Motors
- Stepper Motor Basics
- Stepper Motor System Selection Guide
- Control of Stepping Motors - A Tutorial – Douglas W. Jones, アイオワ大学
- Stepper Motor Drivers: RMS vs Peak Current
- Uni-polar versus Bi-polar
- Finding the different ways a stepper motor can be wired
- Animation of a stepping Motor
- Stepper Motor Disassembled
- Stepper Motor acceleration algorithm
|
電動機(電気モータ)
|
|
|---|---|
| 基本型 | |
| DCモータ | |
|
AC SC 機械
整流子 |
|
|
AC SC 電気
整流子 |
|
|
AC 誘導電動機
(induction (IM)) |
|
| AC 同期電動機(SM) | |
|
Special magnetic
machines |
|
| 非磁性 | |
|
Enclosure Type
|
|
|
コンポーネントおよび
アクセサリー |
|
| モーター制御器 |
|
|
歴史, 教育,
レクリエーション利用 |
|
| 未来的、, 実験的 | |
| 関連トピック |
|
| 人物 | |
| 関連項目 | |
|
|
| |
|
- ステッピング‐モーターのページへのリンク
