ダイナミック‐ポジショニング‐システム【dynamic positioning system】
ディー‐ピー‐エス【DPS】
ダイナミック・ポジショニング・システム
自動船位保持
読み方: じどうせんいほじ
【英】: dynamic positioning system
同義語: ダイナミック・ポジショニング・システム
【英】: dynamic positioning system
同義語: ダイナミック・ポジショニング・システム
| 従来のアンカーとチェーンによる機械的係留方式が困難な大水深の海域などにおいて、船または浮遊式海洋掘削リグ(船型、半潜水型)を洋上の一定位置に保持するにあたり、船自体の持つ推進装置(スラスター)を自動的に制御することにより、アンカーなしで船を定位置に保持するシステムである。 自動胎位保持システムは、ワーク・ボート、潜水作業船などで多数の実績を持つが、石油掘削リグとしての実用機は、1971 年に建造された SEDCO 445 が最初であり、現在、石油掘削リグとして 18 基が稼働している。一般に自動船位保持システムは、(1) 海底の坑口と船体との相対位置を検出する位置検出システム、(2) 検出された位置情報に基づき位置保持に必要な推進力の大きさと方向を制御する位置制御システム、(3) 制御信号に基づき推進力を発生する推進システムの三つのシステムから構成されている。 (1) 位置検出システム:主な位置検出システムとしては、海底に設置したビーコン、またはトランスポンダーと掘削リグに取り付けたハイドロフォンにより基準点に対する船体の相対位置を求める超音波方式、海底の基準点と船体との間に張り渡したワイヤーの角度により船体位置を求めるトートワイヤー方式、ライザー・パイプ基部に取り付けたセンサーによりライザー・パイプの傾斜角を検知し船体位置を求めるライザー・アングル方式がある。通常は、精度の高い超音波方式を主とし、トートワイヤー方式をバックアップとしている。 (2) 位置制御システム:一般的な位置制御システムは、コンピューターを用いた PID 制御(position integral derivative)であるが、船体の位置偏差量やスラスター容量を小さくするため、船体に作用する外力を検知し制御に加味するフィード・フォワード制御やフィルターの使用などによる制御方式も併用される。 (3) 推進システム:位置制御システムからの信号に基づき、船体の位置保持に必要な推進力を与えるシステムであり、代表的な推進装置(スラスター)として船体に対し横方向の推進力を与えるトンネル・スラスターと、推進力方向が可変なアジマス・スラスターがある。推進システムは、これらのスラスターを数基組み合わせて構成されている。 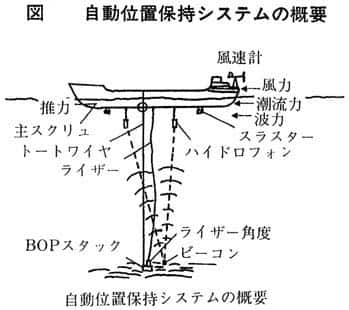 |
ダイナミックポジショニングシステム Dynamic Positioning System
| 浮遊式海洋掘削リグ(セミサブ,ドリルシップ)の位置保持システム。従来方式のアンカー設置なしに掘削地点に定点保持できるので,稼動水深に限界がない。現在の稼動水深の限界はライザーパイプの機械的特性から限定される。ウェルセンターの位置は,船体のハイドロフォン(トランスデューサー)およびウェルヘッドに設置されたトランスポンダーの音響信号で決定される。音響信号をコンピュータで解析し,目標位置を求め,環境条件(風,波浪,潮流)で補正しスラスターの向き,回転数を制御する。しかし常時スラスターを使用し船位を保持するため,大容量の動力を必要とする。 | |
 |
|
| 分野 | 新技術 |
| 同義語 | |
| 関連用語 | ビーコン, ハイドロフォン, トートワイヤ, トランスポンダ, GPS, スラスター |
| 類似語 | |
| 略語 | DPS |
|
|
自動船位保持技術 Dynamic Positioning System
「Dynamic Positioning System」の例文・使い方・用例・文例
- Boston Dynamicsのロボット「RHex」は、いろんな地形を走れるすごいやつです。
Weblio日本語例文用例辞書はプログラムで機械的に例文を生成しているため、不適切な項目が含まれていることもあります。ご了承くださいませ。
- dynamic positioning systemのページへのリンク


