マーズ・エクスプロレーション・ローバ
名称:マーズ・エクスプロレーション・ローバ/Mars ExplorationRovers(MER)
小分類:火星探査
開発機関・会社:アメリカ航空宇宙局(NASA)
運用機関・会社:アメリカ航空宇宙局(NASA)
打ち上げ年月日:2003年6〜7月
打ち上げ国名:アメリカ/アメリカ航空宇宙局(NASA)
打ち上げロケット:デルタII
打ち上げ場所:ケープカナベラル空軍基地
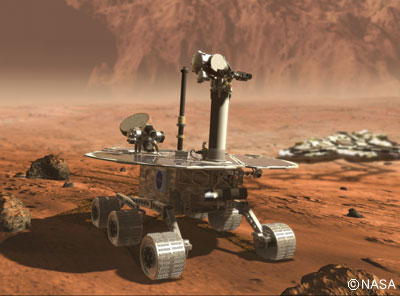
「マーズ・エクスプロレーション・ローバ」は、火星の2ヵ所に2台の同じタイプのローバ(探査自動車)を着陸させ、地表下に存在するといわれる液体の水を探す探査計画です。2台のローバは2003年5月と7月に打ち上げられ、それぞれ7ヵ月半の宇宙飛行の後、2004年1月4日に1号機「スピリット」が、2004年1月25日に2号機「オポチュニティ」が、それぞれ着陸に成功しました。ローバは重さ185kgで、ゴルフ場で使われる電気自動車程度の大きさです。ローバにはパノラマ画像撮影カメラ(Pancam)や岩石を削り取る研磨装置(RAT)、組成を分析する熱赤外線分光器(MiniTES)などが搭載され、約3ヵ月にわたって探査する予定でしたが、2005年1月現在、予定をはるかに超過して探査を続けています。
1.どんな形をして、どんな性能を持っているの?
着陸するのは6個の車輪を持つローバ(自走式火星自動車)2台で、マーズ・パスファインダー同様、エアバッグを使って火星に着陸します。ローバ1台の重さは約185kgで、大きさはゴルフ場で使われるゴルフカートくらい。昆虫の羽のような2枚の太陽電池パネルを背中に持ち、1日100m2を移動して火星表面を観察します。ローバに搭載される観測装置は、パノラマ画像撮影カメラ(Pancam)、岩石を削り取る研磨装置(RAT)、地表の組成を分析する熱赤外線分光器(MiniTES)、メスバウアー分光器、アルファ線・X線カメラ(APXS)などです。
2.どんな目的に使用されたの?
火星の地表面の土壌の組成などを分析し、火星の地表下に水(氷)の痕跡がないか見つけるのが目的です。
3.宇宙でどんなことをし、今はどうなっているの?
2003年6月11日に1号機「スピリット」が、2003年7月8日に2号機「オポチュニティ」が打ち上げられました。7ヵ月の飛行ののち、2004年1月4日に「スピリット」が、1月25日に「オポチュニティ」が着陸しました。
着陸後、ローバは火星の表面の探査を行っています。両ローバとも、かつて火星に水が大量に存在したという証拠を発見しました。2005年現在、探査を継続中です。
4.打ち上げ・飛行の順序はどうなっているの?
2003年6月11日に1号機「スピリット」が、2003年7月8日に2号機「オポチュニティ」が打ち上げられました。7ヵ月の飛行の後、2004年1月4日に「スピリット」が、1月25日に「オポチュニティ」が着陸しました。
5.このほかに、同じシリーズでどんな機種があるの?
火星に着陸したローバとしては1997年7月4日に火星に着陸した「マーズ・パスファインダー」のローバ「ソジャーナ」があります。また、火星に存在すると推測されている水を探査するNASAのミッションとしては、2001年の「2001マーズ・オデッセイ」などがあります。
- マーズ・エクスプロレーション・ローバのページへのリンク
