ロケットの慣性航法
ジャイロと加速度計で速度と位置をわり出す「慣性航没
ジャイロによってロケットの姿勢の変化を測定し、加速度計の出力から、速度と位置を随時割り出していくことを「慣性航没(かんせいこうほう)といいます。ロケットの中の、ジャイロと加速度計をまとめて「慣性センサ」と呼び、これらをつめた箱を「IMU」といいます。IMUには、「プラットフォーム方式」と「ストラップダウン方式」の2つがあります。
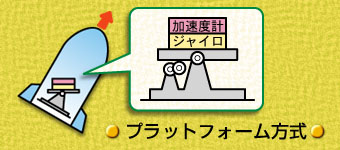
慣性センサを一定の姿勢に保つ「プラットフォーム方式」
空間に対して、IMU(慣性センサユニット)を一定の姿勢に保つ方式です。宇宙開発事業団(現 宇宙航空研究開発機構(JAXA))のH-I ロケットは、プラットフォーム方式を採用しています。
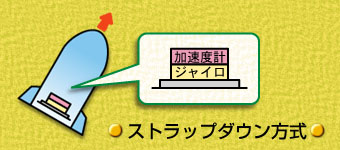
ロケットに慣性センサを固定する「ストラップダウン方式」は小型で高精度
IMU(慣性センサユニット)をロケットに固定する方式です。ストラップダウン方式は、プラットフォーム方式に比べて低重量、小型、低消費電力、高精度というふうに技術的には優位ですが、機体の運動を検出するための入力角度範囲の広いジャイロと、座標変換をおこなうための高速搭載計算機が必要になります。宇宙開発事業団のN-IIロケット、H-IIロケット、H-IIAロケットはストラップダウン方式を採用しています。
ロケットの慣性航法と同じ種類の言葉
- ロケットの慣性航法のページへのリンク
