アンカー船位保持
読み方: あんかーせんいほじ
【英】: anchor positioning system
【英】: anchor positioning system
| 係留索に接続された何本かのアンカーを海底に設置することによってセミサブマーシブル・リグやドリル・シップなどの浮遊式海洋掘削装置を坑井位置に保持することをいう。浮遊式海洋掘削装置は、風、波、潮流などの外力により位置が変動するが、この位置の変化は海底の坑口装置と掘削装置を結ぶライザー・パイプの挙動に大きな影響を与え、掘削作業に支障を来す。このため、船位の変動を最小に抑えるようにアンカー船位保持を行うことが重要である。そのため、掘削地点での掘削期間中の船位変動を最小にする係留条件を求める、ライザーおよび係留挙動解析が実施される。係留挙動解析は以下の手順により行われる。 (1) 事前調査:掘削地点の気象・海象データの入手、および海底土質のサンプリングを行う。 (2) 把駐力の算定:事前調査の海底土質調査の結果に基づき、アンカーおよび係留索のチェーン(またはワイヤー)の合計把駐力を求める。 (3) 装置に加わる外力の算定:事前調査の海象・気象データよりその海域の気象・海象によって加わる外力を算定する。 (4) 最適係留条件の決定:アンカー係留索のカテナリー解析に基づく変位量を求め、最大稼働率が得られる係留条件(アンカー・ライン長、アンカー・ライン張力、アンカー配置など)を決定する。 アンカーにより船位保持が可能な水深は気象・海象条件に左右されるが、一般に 500m が限界といわれ、それ以上の水深では自動船位保持(ダイナミック・ポジショニング・システム:DPS)が使用される。 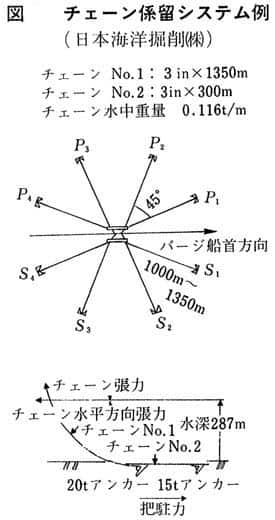 |
- アンカー船位保持のページへのリンク
