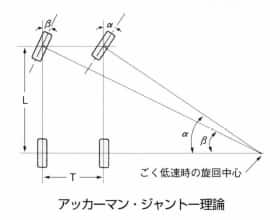
アッカーマン・ジャントー理論
英語 Ackermann-Jeantaud theory
遠心力を無視できるごく低速走行時に、内外輪のタイヤにスリップ角が生じないように内輪舵角α と外輪舵角βの関係を幾何学的に表した理論。アッカーマン(イギリス)が発明しジャントー(フランス)によって改良された。ごく低速時の車両旋回中心はリヤアクスルの延長線上にくる。内外輪の向きをそれぞれの走行軌跡の接線方向に向けるとすると、理論式はT/L=(1÷tanβ)-(1÷tanα)となる(L:ホイールベース、T:トレッド)。内輪舵角は常に外輪舵角より大きく、舵角が大きくなるほどその差は開く。車速が上がって遠心力が発生するにつれて、車両の旋回中心はリヤアクスルより前方に移動するので、この理論とは離れてくる。
※「大車林」の内容は、発行日である2004年時点の情報となっております。
- アッカーマン・ジャントー理論のページへのリンク
