並列計算
出典: フリー百科事典『ウィキペディア(Wikipedia)』 (2023/09/07 09:10 UTC 版)
背景
従来、コンピュータソフトウェアは逐次的に計算されるものとして書かれてきた。問題を解くためにアルゴリズムが構築され、それによって逐次的に実行される命令列が生成される。その命令列は、コンピュータのCPU上で実行される。命令は一度に1つずつ実行される[3]。
一方並列計算では、複数の計算ノードが同時並列的に動作して問題を解く。問題は独立した部分に分割され、各計算ノードがアルゴリズムの一部を同時並列的に実行する。計算ノードの実体は様々であり、マルチプロセッサ型のコンピュータの各CPUだったり、ネットワーク上のコンピュータだったり、専用ハードウェアだったり、それらの組合せだったりする[3]。
1980年代から2004年まで、コンピュータの性能向上の主たる要因はクロック周波数の向上にあった。プログラムの実行時間は、命令数と1命令あたりの平均実行時間をかけたものに比例する。他の要因が全く変化しないと仮定すると、クロック周波数の向上によって1命令あたりの平均実行時間が減少する[4]。
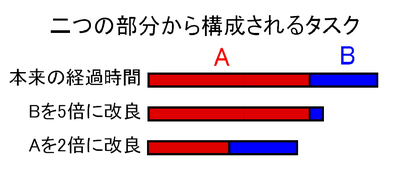
一方で、マイクロプロセッサの消費電力は グスタフソンの法則は、アムダールの法則とも密接に関連する計算機工学における法則である。グスタフソンの法則は以下の式で表される。
並列プログラミング言語と並列コンピュータには一貫性モデル(メモリモデルとも呼ぶ)が必須である。一貫性モデルとは、メモリ上の操作に関する規則を定義したものであり、どのように結果が生成されるかを定義したものである。
最初に定義された一貫性モデルは、レスリー・ランポートの逐次一貫性モデルである。逐次一貫性とは、並列プログラムを並列実行したときの結果と、それと等価な逐次プログラムの結果が同じという特性である。プログラムが逐次一貫性を持つとは、「…任意の実行の結果が、それを全プロセッサが逐次的順序で実行された場合と同じであり、その順序がプログラム内で指定された順序と同じである」ことを意味する[11]。
ソフトウェアトランザクショナルメモリは、一貫性モデルの典型例である。ソフトウェアトランザクショナルメモリは、データベース理論から不可分操作の概念を借り、それをメモリアクセスに適用したものである。
数学的にこれらのモデルを表現する方法はいくつか存在する。プロセス計算は並行性を扱う数学の一分野である。プロセス計算はさらにアンビエント計算、calculus of communicating systems、Communicating Sequential Processesなどに分類される。ペトリネットは一貫性モデルの定式化を試みた初期の例である。それに基づいて後にデータフロー理論が構築された。そして、データフローの考え方を物理的に実装したデータフロー・アーキテクチャが開発された。
マイケル・J・フリンは、並列(および逐次)コンピュータ/プログラムの分類であるフリンの分類を提案した。フリンは命令列が単一か複数かという点と、その命令列(群)が扱うデータが単一か複数かによって4種類に分類した。
SISD(単一命令、単一データ)は、完全に逐次的なプログラムと等価である。SIMD(単一命令、複数データ)は同じ操作を多数のデータに対して行う場合を意味する。これは信号処理などで一般的である。MISD(複数命令、単一データ)はあまり使われない分類だが、フォールトトレラントシステムの冗長構成を指すことがある。シストリックアレイのようなアーキテクチャがこれに相当するが、実際の応用例は少ない。MIMD(複数命令、複数データ)は、ほとんどの並列プログラムに対応する。
デイビッド・パターソンとジョン・ヘネシーの著書には「もちろん一部のマシンはこれらの混成であるが、単純で分かりやすく、とりあえずの近似としては最適であるが故にこの分類が今も使われている」とある[12]。
フリンの分類
- 並列計算のページへのリンク