操舵比
英語 differential ratio between steering angle of rear wheels to front wheels
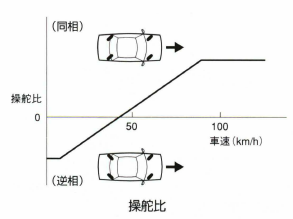
4WSにおいて、前輪実舵角に対する後輪実舵角の比をいう。前後輪が同じ方向に切れる同相をプラス、その逆をマイナスとし、ゼロは前輪操舵車の状態を示す。一般に、4WSでは低速時には逆相とし、50km/h前後でゼロ、車速が高まると同相とし、この間を連続的に変化させる。これによって、低速時には小まわり性がよくなり、高速では同相による重心点横滑り角やヨーレートの抑制で、安定性を向上させることができる。さらに進んだ4WSでは、過渡状態でのより安定した運動を実現するために、車速のみならず、操舵速度やヨーレートをパラメーターにした複雑な操舵比の制御も行われる。
※「大車林」の内容は、発行日である2004年時点の情報となっております。
- 操舵比のページへのリンク